Mass-produced (stamped / extruded / whatever) mechanical parts + hackable 'brains' is.
Robots do lend themselves well w/ respect to that last part. Worst case is rip out its control electronics wholesale & replace with your own motor drivers etc.
My potential concern is the "Apple" gatekeeping of parts.
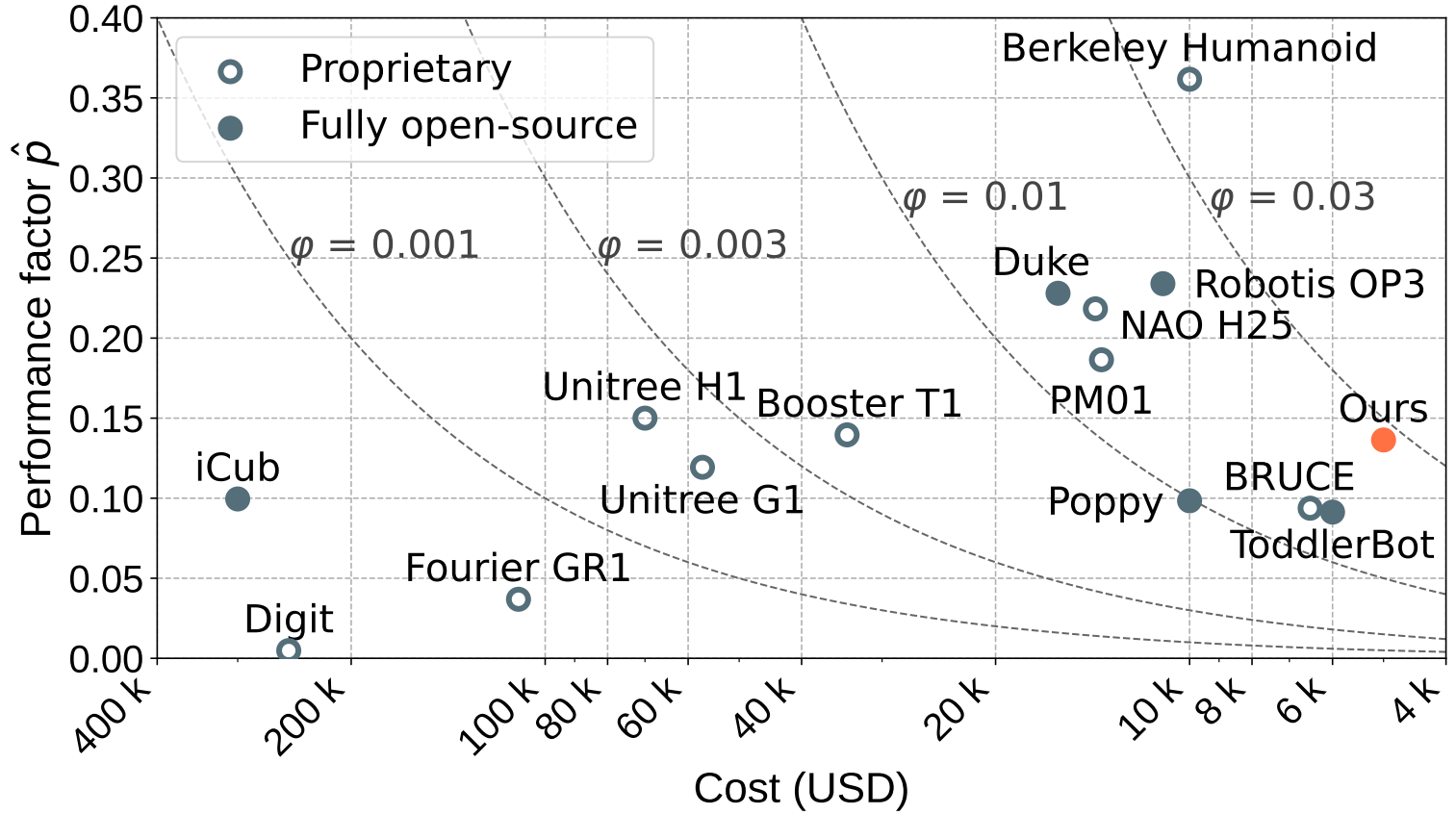
why does it say the Berkeley Humanoid is closed source here? Is it a typo, was this paper peer-reviewed?
A) bring down cost and expand the design space for the hardware and
B) minimise the barriers to working on the "software" problems where there still seem to be huge areas of mostly unaddressed challenges.
An open source platform seems like a good thing for both.
It shows they threw away too much while creating the lite version.
The comment criticizes a chart or metric comparing "performance factor" to torque and degrees of freedom (DOFs) in robotics, calling it "the most silly thing" the commenter, a licensed mechanical engineer, has seen. By referencing "Kony 2012"—a widely mocked internet campaign—they emphasize their point about the chart's perceived absurdity. ([The performance factor vs. torque vs. DOFs is the most silly thing as ...](https://news.ycombinator.com/item?id=43801052&utm_source=cha...))
The critique likely stems from the idea that combining performance factor, torque, and DOFs into a single comparison oversimplifies complex engineering concepts. Torque and DOFs are distinct mechanical properties, and "performance factor" is a vague term without a clear definition. Such a chart might misleadingly suggest direct correlations where none exist, leading to confusion or misinterpretation.
In essence, the commenter is expressing frustration over what they see as a technically flawed and potentially misleading representation of robotic performance metrics.
https://youtu.be/0Gkl1H2eKsM?t=99
Servitude: Robot Waiter:
https://www.youtube.com/watch?v=NXsUetUzXlg
Empathy: Broken Robot:
{kind=link}